Calculating Your Android's Position from Raw GNSS Pseudorange Measurements
This Jupyter notebook was written by Mitchell Johnson. The source code, as well as the gnssutils Python package containing the EphemerisManager module, can be found on Github.
Introduction
Satellite navigation is absolutely fascinating. The GPS receiver in your smartphone uses concepts as diverse as orbital mechanics, digital signal processing, convex optimization, and Einstein’s theory of relativity to determine your location anywhere on Earth within seconds.
From the development of GPS in the 80’s until the early 2010s, satellite navigation was a specialized tool used primarily by the military, airlines, surveyors, and private citizens fortunate enough to own an expensive personal receiver. Widespread GNSS receiver adoption in smartphones over the past decade, combined with the development of new GNSS constellations from China and the EU, have commoditized satellite navigation like never before.
Despite these changes, GNSS receivers were mostly black boxes until recently. Most standalone receivers output only a final position, velocity, and time solution, with dilution of precision and satellite signal-to-noise ratios included if you’re lucky.
That changed in 2016 with Google’s introduction of the raw GNSS measurement API in Android 7. Several applications have since been developed to make use of this data, including Google’s own GnssLogger, which provides an interface for logging raw GNSS measurements to a text file. It is now possible for any of the billions of Android device owners worldwide to experiment with raw GNSS measurement data for themselves.
What’s still missing is an approachable, easy-to-use platform for processing this data. Google’s recent paper, Android Raw GNSS Measurement Datasets for Precise Positioning, contains the following table listing publicly available software packages for GNSS positioning:

Notice that all of the open source options are either written in C/C++ or MATLAB. C and C++ are highly performant languages, but neither is particularly approachable without a software engineering background. MATLAB is much more familiar to engineers and scientists, but I believe its widespread use is harmful for reasons I outline here.
To address this void in approachable GNSS software packages built on open source platforms, I decided to develop my own. Engineering textbooks and technical papers provide derivations and explanations, but it is often difficult to translate mathematical equations into working code. The Jupyter notebook format allows me to place Markdown cells with equations and explanations in between lines of code. I will try to keep the code as similar as possible to the equations and reference individual equation numbers when necessary.
This Jupyter notebook, along with the accompanying EphemerisManager class, provide everything a user needs to calculate the position of their Android phone using recorded GNSS measurements. All that’s necessary (in addition to the phone, of course) is an environment capable of running Jupyter notebooks.
I would like to thank the developers of the tools listed above. I used Google’s GPS Measurement Tools and the European Space Agency’s GNSS resources as references while developing this project, in addition to many other sources mentioned below.
Background
This post assumes readers have a general idea of the principles used in triangulating receiver position from satellite signals. If you’re completely unfamiliar, you may want to give my previous post a quick read before continuing.
Once your receiver acquires a signal from four or more satellites, corrections are applied for:
- Satellite clock bias (including relativistic effects)
- Ionospheric delay
- Rotation of the Earth during signal transmission time
At this point positioning techniques begin to diverge. There are many types of GNSS receivers and positioning algorithms. The basic techniques are, roughly in order of increasing accuracy:
- Simple unweighted least squares solution
- Weighted least squares, with weights determined based on measurement uncertainty, signal strength, satellite elevation angle, etc.
- Kalman filter, which uses information from prior position fixes to smooth position updates over time
My goal for this post is to provide the simplest solution possible that still produces a usable position output. Since using signals from multiple constellations requires accounting for different reference clocks and ephemeris formats between the systems, this solution uses GPS only. We will use the unweighted least squares approach, without correction for ionospheric delay or the rotation of the Earth during signal transmission. Ignoring satellite clock bias produces errors in the hundreds of kilometers, so we will correct for this in our solution.
So, let’s get started. The import process and data directory determination below assume that the Python interpreter’s working directory is the same as this notebook, and that the gnssutils package and data repository are located in the parent directory. If that is not the case, you’ll have to modify accordingly.
import sys, os, csv
parent_directory = os.path.split(os.getcwd())[0]
ephemeris_data_directory = os.path.join(parent_directory, 'data')
sys.path.insert(0, parent_directory)
from datetime import datetime, timezone, timedelta
import pandas as pd
import numpy as np
import matplotlib.pyplot as plt
import navpy
from gnssutils import EphemerisManager
Data Aquisition
I collected this sample dataset using Google’s GnssLogger app on my Samsung Galaxy S9 Plus while driving through downtown Seattle. If you’d like to collect your own data and process it with this notebook, you can find the code and documentation here.
Let’s read the log file from the Android GnssLogger app and parse out the Fix and Raw entries, which represent Android location fixes and raw GNSS measurements, respectively. Then we’ll format the satellite IDs in the raw data to match up with the RINEX 3.0 standard and convert the columns we need to calculate receiver position to numeric values. We’ll also filter the data so that we’re only working with GPS measurements.
# Get path to sample file in data directory, which is located in the parent directory of this notebook
input_filepath = os.path.join(parent_directory, 'data', 'sample', 'gnss_log_2020_12_02_17_19_39.txt')
with open(input_filepath) as csvfile:
reader = csv.reader(csvfile)
for row in reader:
if row[0][0] == '#':
if 'Fix' in row[0]:
android_fixes = [row[1:]]
elif 'Raw' in row[0]:
measurements = [row[1:]]
else:
if row[0] == 'Fix':
android_fixes.append(row[1:])
elif row[0] == 'Raw':
measurements.append(row[1:])
android_fixes = pd.DataFrame(android_fixes[1:], columns = android_fixes[0])
measurements = pd.DataFrame(measurements[1:], columns = measurements[0])
# Format satellite IDs
measurements.loc[measurements['Svid'].str.len() == 1, 'Svid'] = '0' + measurements['Svid']
measurements.loc[measurements['ConstellationType'] == '1', 'Constellation'] = 'G'
measurements.loc[measurements['ConstellationType'] == '3', 'Constellation'] = 'R'
measurements['SvName'] = measurements['Constellation'] + measurements['Svid']
# Remove all non-GPS measurements
measurements = measurements.loc[measurements['Constellation'] == 'G']
# Convert columns to numeric representation
measurements['Cn0DbHz'] = pd.to_numeric(measurements['Cn0DbHz'])
measurements['TimeNanos'] = pd.to_numeric(measurements['TimeNanos'])
measurements['FullBiasNanos'] = pd.to_numeric(measurements['FullBiasNanos'])
measurements['ReceivedSvTimeNanos'] = pd.to_numeric(measurements['ReceivedSvTimeNanos'])
measurements['PseudorangeRateMetersPerSecond'] = pd.to_numeric(measurements['PseudorangeRateMetersPerSecond'])
measurements['ReceivedSvTimeUncertaintyNanos'] = pd.to_numeric(measurements['ReceivedSvTimeUncertaintyNanos'])
# A few measurement values are not provided by all phones
# We'll check for them and initialize them with zeros if missing
if 'BiasNanos' in measurements.columns:
measurements['BiasNanos'] = pd.to_numeric(measurements['BiasNanos'])
else:
measurements['BiasNanos'] = 0
if 'TimeOffsetNanos' in measurements.columns:
measurements['TimeOffsetNanos'] = pd.to_numeric(measurements['TimeOffsetNanos'])
else:
measurements['TimeOffsetNanos'] = 0
print(measurements.columns)
Index(['ElapsedRealtimeMillis', 'TimeNanos', 'LeapSecond',
'TimeUncertaintyNanos', 'FullBiasNanos', 'BiasNanos',
'BiasUncertaintyNanos', 'DriftNanosPerSecond',
'DriftUncertaintyNanosPerSecond', 'HardwareClockDiscontinuityCount',
'Svid', 'TimeOffsetNanos', 'State', 'ReceivedSvTimeNanos',
'ReceivedSvTimeUncertaintyNanos', 'Cn0DbHz',
'PseudorangeRateMetersPerSecond',
'PseudorangeRateUncertaintyMetersPerSecond',
'AccumulatedDeltaRangeState', 'AccumulatedDeltaRangeMeters',
'AccumulatedDeltaRangeUncertaintyMeters', 'CarrierFrequencyHz',
'CarrierCycles', 'CarrierPhase', 'CarrierPhaseUncertainty',
'MultipathIndicator', 'SnrInDb', 'ConstellationType', 'AgcDb',
'CarrierFrequencyHz', 'Constellation', 'SvName'],
dtype='object')
Pre-processing
Those with experience in GNSS data processing will probably notice that we’re missing a few important fields for calculating receiver position. For each satellite the process requires:
- Time of signal transmission - used to calculate the satellite’s location when the signal was transmitted
- Measured pseudorange - a rough estimate of the distance between each satellite and the receiver before correcting for clock biases, ionospheric delay, and other phenomena which we’ll explain later
- Ephemeris parameters - a set of parameters required to calculate the satellite’s position in space
Of these, the only one provided directly by Android’s raw GNSS measurement API is the time of signal transmission, labeled ReceivedSvTimeNanos. Fortunately, the European Global Navigation Satellite Systems Agency (GSA) published a very helpful white paper explaining the parameters reported by Android and how they can be used to generate the values we need.
Ephemeris parameters are an exception. The Android API technically has commands for obtaining these, but they don’t seem to work on my Galaxy S9 - at least not in the GnssLogger app. Instead we’ll get them from the International GNSS Service (IGS), which maintains an array of GNSS data products available to the public through NASA’s Crustal Dynamics Data Information System, the German Bundesamt für Kartographie und Geodäsie (BKG), and the French Institut Géographique National (IGN). More on this later.
Timestamp Generation
First things first: what time were these measurements taken?
It turns out this question isn’t as simple as it might sound. The GPS system has its own time scale, which began at the so-called “GPS Epoch” (midnight on January 6th, 1980) and differs from UTC by some number of leap seconds. Leap seconds are used to adjust UTC for changes in the rotation of the Earth, and are decided by the International Earth Rotation and Reference Systems Service. If you’re interested in reading more about leap seconds and international time standards, you can check out this FAQ from the US National Institute of Standards and Technology.
We’re going to need a Python datetime timestamp for each measurement in order to determine which ephemeris files to retrieve from IGS. To get one, let’s calculate the GPS time in nanoseconds using the equations from Section 2.4 of the GSA’s white paper. Then we’ll convert it to a normal Unix timestamp using the Pandas.to_datetime() function with the GPS reference epoch.
Note that the UTC flag is set to True in the Pandas.to_datetime() method. The timestamp column needs to be in UTC because the ephemeris files provided by IGS are labeled by UTC date and time. Since Python’s datetime library defaults to local time on some systems, it was necessary to keep everything timezone-aware to avoid mix-ups.
This nomenclature is a bit confusing since we’re using the to_datetime() method to create a column called UnixTime, not Utc. Unix time and UTC are technically in the same time zone, but UTC includes leap seconds, while Unix time does not. Since we’re creating a timestamp from the number of seconds elapsed since the GPS epoch, the resulting timestamp could differ from UTC by some number of leap seconds. That’s close enough to ensure we get the correct ephemeris file, and it won’t affect the actual position calculations because we don’t use the UnixTime column for those.
Finally, let’s split the data into measurement epochs. We do this by creating a new column and setting it to 1 whenever the difference between a timestamp and the previous timestamp is greater than 200 milliseconds using the DataFrame.shift() command. Then we use the Series.cumsum() method to generate unique numbers for the individual epochs.
measurements['GpsTimeNanos'] = measurements['TimeNanos'] - (measurements['FullBiasNanos'] - measurements['BiasNanos'])
gpsepoch = datetime(1980, 1, 6, 0, 0, 0)
measurements['UnixTime'] = pd.to_datetime(measurements['GpsTimeNanos'], utc = True, origin=gpsepoch)
measurements['UnixTime'] = measurements['UnixTime']
# Split data into measurement epochs
measurements['Epoch'] = 0
measurements.loc[measurements['UnixTime'] - measurements['UnixTime'].shift() > timedelta(milliseconds=200), 'Epoch'] = 1
measurements['Epoch'] = measurements['Epoch'].cumsum()
Pseudorange Calculation
Next let’s calculate the estimated signal transmission and reception times, once again using the equations found in Section 2.4 of the GSA white paper mentioned above.
GPS satellites format signal transmission times in seconds of the current GPS week, but the Android API reports signal reception times in seconds since the GPS epoch. To calculate the difference between the estimated signal transmission and reception times, we’ll have to subtract the number of weeks since the GPS Epoch times the number of seconds per week from the reported signal reception time. We’ll then be left with the columns tTxSeconds and tRxSeconds, both in seconds since the start of the current GPS week.
Once we’ve determined these, we can calculate a measured pseudorange value for each satellite by taking the difference between the two and multiplying by the speed of light:
\[\rho_{measured} = \frac{(t_{Rx} - t_{Tx})}{1E9} \cdot c\]WEEKSEC = 604800
LIGHTSPEED = 2.99792458e8
# This should account for rollovers since it uses a week number specific to each measurement
measurements['tRxGnssNanos'] = measurements['TimeNanos'] + measurements['TimeOffsetNanos'] - (measurements['FullBiasNanos'].iloc[0] + measurements['BiasNanos'].iloc[0])
measurements['GpsWeekNumber'] = np.floor(1e-9 * measurements['tRxGnssNanos'] / WEEKSEC)
measurements['tRxSeconds'] = 1e-9*measurements['tRxGnssNanos'] - WEEKSEC * measurements['GpsWeekNumber']
measurements['tTxSeconds'] = 1e-9*(measurements['ReceivedSvTimeNanos'] + measurements['TimeOffsetNanos'])
# Calculate pseudorange in seconds
measurements['prSeconds'] = measurements['tRxSeconds'] - measurements['tTxSeconds']
# Conver to meters
measurements['PrM'] = LIGHTSPEED * measurements['prSeconds']
measurements['PrSigmaM'] = LIGHTSPEED * 1e-9 * measurements['ReceivedSvTimeUncertaintyNanos']
Retrieving Ephemeris Data
Now that we have pseudorange values, we can begin the standard process for calculating receiver position. First we need to retrieve the ephemeris data for each satellite from one of the International GNSS Service (IGS) analysis centers. These include NASA’s CDDIS and the German BKG.
This process is a pain, so I wrote a Python module to handle the details. You can view the code and documentation here, but all you have to do is initialize an instance of the EphemerisManager class with a path to the directory where you want it to cache downloaded files. Then, provide the get_ephemeris() method with a Python datetime object and and list of satellites, and it will return a Pandas dataframe of valid ephemeris parameters for those satellites.
Broadcast ephemerides are good for four hours from the time they are issued, but the GPS control segment generally uploads new values every two hours. The EphemerisManager class downloads a whole day’s worth of data and then returns the most recent parameters at the requested time for each satellite. Because of this we’re going to run the get_ephemeris() method for every epoch in case new parameters were issued since the last measurement was taken.
For the sake of demonstration, let’s start by walking through the position solution for just one measurement epoch. We’ll use the first epoch in the dataset with measurements from at least five satellites.
manager = EphemerisManager(ephemeris_data_directory)
epoch = 0
num_sats = 0
while num_sats < 5 :
one_epoch = measurements.loc[(measurements['Epoch'] == epoch) & (measurements['prSeconds'] < 0.1)].drop_duplicates(subset='SvName')
timestamp = one_epoch.iloc[0]['UnixTime'].to_pydatetime(warn=False)
one_epoch.set_index('SvName', inplace=True)
num_sats = len(one_epoch.index)
epoch += 1
sats = one_epoch.index.unique().tolist()
ephemeris = manager.get_ephemeris(timestamp, sats)
print(timestamp)
print(one_epoch[['UnixTime', 'tTxSeconds', 'GpsWeekNumber']])
2020-12-03 01:19:57.432062+00:00
UnixTime tTxSeconds GpsWeekNumber
SvName
G05 2020-12-03 01:19:57.432062976+00:00 350397.354393 2134.0
G07 2020-12-03 01:19:57.432062976+00:00 350397.362980 2134.0
G08 2020-12-03 01:19:57.432062976+00:00 350397.359065 2134.0
G09 2020-12-03 01:19:57.432062976+00:00 350397.356830 2134.0
G13 2020-12-03 01:19:57.432062976+00:00 350397.353015 2134.0
G14 2020-12-03 01:19:57.432062976+00:00 350397.359692 2134.0
G27 2020-12-03 01:19:57.432062976+00:00 350397.354134 2134.0
G28 2020-12-03 01:19:57.432062976+00:00 350397.358284 2134.0
G30 2020-12-03 01:19:57.432062976+00:00 350397.363215 2134.0
Okay, we’ve got valid ephemeris parameters and signal transmission time in seconds of the GPS week for one measurement epoch’s worth of data. Time to figure out where these satellites are (or where they were at approximately 01:19:57.432 UTC on December 3rd, 2020).
Coordinate Systems Primer
A brief geometry lesson is in order before I continue.
Latitude, longitude, and altitude (LLA) together make up a spherical coordinate system, which was developed over millennia by geographers for use in celestial navigation. Latitude, longitude and altitude are handy because they quickly give you an idea of where you are generally on Earth - positive latitudes are in the northern hemisphere, positive longitudes west of the Prime Meridian, etc. However, spherical coordinates tend to complicate the math involved with satellite navigation because they are not linear. One degree of latitude equals roughly 69 miles (111 km) at the equator but only 49 miles (79 km) at 45 degrees north or south.
The Earth-centered, Earth-fixed (ECEF) coordinate system solves this issue. It is a Cartesian coordinate system with coordinates on X, Y, and Z axes which rotate with the Earth. Satellite navigation systems perform most of their calculations in ECEF coordinates before converting to LLA for user output; hence our function for calculating satellite position will output ECEF coordinates.
Another challenge arises when calculating the vector between two points on Earth. A linear coordinate system is also desired in this case. However, ECEF doesn’t quite work for relative positioning on Earth’s surface, because, for example, the X and Y axes can point east, west, up, down, or somewhere in between depending on your location. Hence a third system called local tangent plane coordinates is used to define vectors between coordinates. The most common of these are east, north, up (ENU) and north, east, down (NED), which we will use later.
Satellite Position Determination
Calculating satellite position from ephemeris data is a bit involved, but the details are conveniently laid out in Tables 20-III and 20-IV of the GPS Interface Specification Document. The function below performs this calculation, taking a Pandas dataframe with the ephemeris parameters for every satellite and a dataseries containing the transmit time for all received signals in seconds since the start of the current GPS week. It also calculates the satellite clock offsets for the given transmission time.
def calculate_satellite_position(ephemeris, transmit_time):
mu = 3.986005e14
OmegaDot_e = 7.2921151467e-5
F = -4.442807633e-10
sv_position = pd.DataFrame()
sv_position['sv']= ephemeris.index
sv_position.set_index('sv', inplace=True)
sv_position['t_k'] = transmit_time - ephemeris['t_oe']
A = ephemeris['sqrtA'].pow(2)
n_0 = np.sqrt(mu / A.pow(3))
n = n_0 + ephemeris['deltaN']
M_k = ephemeris['M_0'] + n * sv_position['t_k']
E_k = M_k
err = pd.Series(data=[1]*len(sv_position.index))
i = 0
while err.abs().min() > 1e-8 and i < 10:
new_vals = M_k + ephemeris['e']*np.sin(E_k)
err = new_vals - E_k
E_k = new_vals
i += 1
sinE_k = np.sin(E_k)
cosE_k = np.cos(E_k)
delT_r = F * ephemeris['e'].pow(ephemeris['sqrtA']) * sinE_k
delT_oc = transmit_time - ephemeris['t_oc']
sv_position['delT_sv'] = ephemeris['SVclockBias'] + ephemeris['SVclockDrift'] * delT_oc + ephemeris['SVclockDriftRate'] * delT_oc.pow(2)
v_k = np.arctan2(np.sqrt(1-ephemeris['e'].pow(2))*sinE_k,(cosE_k - ephemeris['e']))
Phi_k = v_k + ephemeris['omega']
sin2Phi_k = np.sin(2*Phi_k)
cos2Phi_k = np.cos(2*Phi_k)
du_k = ephemeris['C_us']*sin2Phi_k + ephemeris['C_uc']*cos2Phi_k
dr_k = ephemeris['C_rs']*sin2Phi_k + ephemeris['C_rc']*cos2Phi_k
di_k = ephemeris['C_is']*sin2Phi_k + ephemeris['C_ic']*cos2Phi_k
u_k = Phi_k + du_k
r_k = A*(1 - ephemeris['e']*np.cos(E_k)) + dr_k
i_k = ephemeris['i_0'] + di_k + ephemeris['IDOT']*sv_position['t_k']
x_k_prime = r_k*np.cos(u_k)
y_k_prime = r_k*np.sin(u_k)
Omega_k = ephemeris['Omega_0'] + (ephemeris['OmegaDot'] - OmegaDot_e)*sv_position['t_k'] - OmegaDot_e*ephemeris['t_oe']
sv_position['x_k'] = x_k_prime*np.cos(Omega_k) - y_k_prime*np.cos(i_k)*np.sin(Omega_k)
sv_position['y_k'] = x_k_prime*np.sin(Omega_k) + y_k_prime*np.cos(i_k)*np.cos(Omega_k)
sv_position['z_k'] = y_k_prime*np.sin(i_k)
return sv_position
# Run the function and check out the results:
sv_position = calculate_satellite_position(ephemeris, one_epoch['tTxSeconds'])
print(sv_position)
t_k delT_sv x_k y_k z_k
sv
G05 4797.354393 -0.000027 -2.169285e+07 4.568031e+06 1.461087e+07
G07 4797.362980 -0.000426 -3.714100e+06 -1.642940e+07 2.075276e+07
G08 4797.359065 -0.000002 7.360204e+06 -1.916176e+07 1.671180e+07
G09 4797.356830 -0.000297 -7.513898e+06 -2.535861e+07 2.249150e+06
G13 4797.353015 0.000071 -1.324738e+07 1.036799e+07 2.038926e+07
G14 4797.359692 0.000052 -2.110816e+07 -1.395532e+07 8.071176e+06
G27 4797.354134 -0.000027 1.340518e+07 -7.095042e+06 2.161816e+07
G28 4797.358284 0.000648 -2.237537e+07 -1.338044e+07 5.115684e+06
G30 4797.363215 -0.000346 -1.305779e+07 -9.338017e+06 2.122874e+07
What Are Pseudoranges, Anyway?
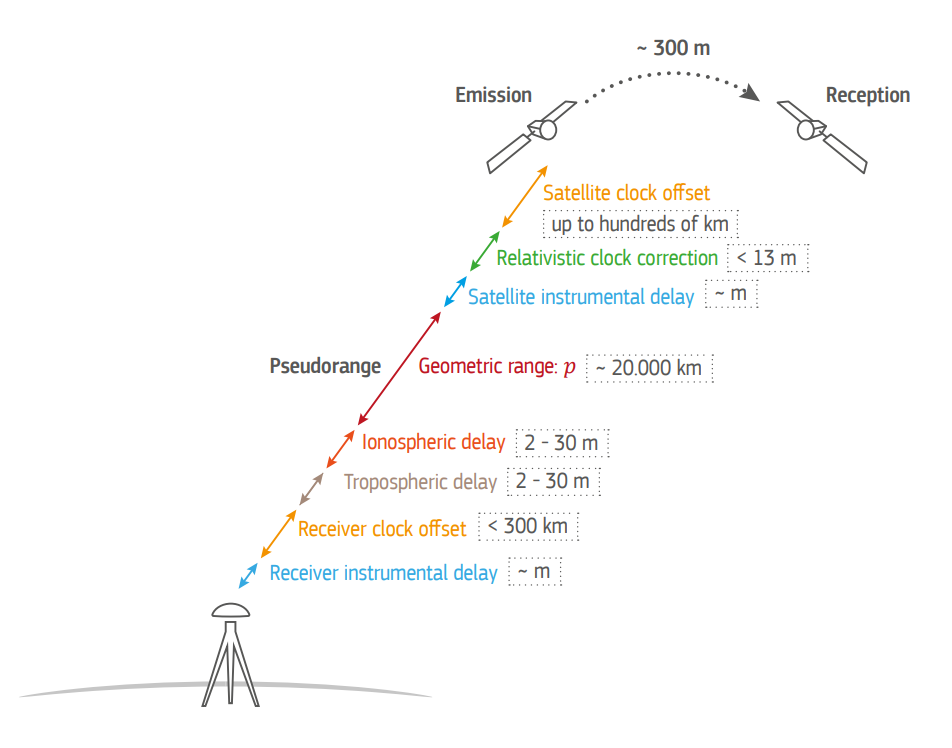
We now have raw pseudorange values, satellite positions, and satellite clock offsets. As I said earlier, these pseudoranges represent a rough estimate of the distance between each satellite and the receiver before correcting for clock biases, ionospheric delay, and “other phenomena”. These errors are summarized by the following figure from p. 15 of the GSA White Paper on raw GNSS measurements from Android devices:
These pseudoranges can be repsresented by the equation (Misra and Enge, 2006):
\[\rho^{(k)}_{measured} = \sqrt{(x^{(k)} - x_r)^2 + (y^{(k)} - y_r)^2 + (z^{(k)} - z_r)^2} + c \cdot \delta t_r - c \cdot \delta t^{(k)} + I^{(k)}(t) + T^{(k)}(t) + \epsilon_\rho^{(k)}\]where $x_r$, $y_r$, $z_r$, and $ \delta t_r $ are the receiver position (in ECEF coordinates) and clock bias (in seconds), $x^{(k)}$, $y^{(k)}$, $z^{(k)}$, and $ \delta t^{(k)} $ are the position and clock bias of the $k$th satellite, $c$ is the speed of light, and $I^{(k)}(t)$ and $T^{(k)}(t)$ are the ionospheric and trophospheric delay terms for the $k$th satellite. $\epsilon_\rho^{(k)}$ accounts for all remaining measurement and modeling errors. Following convention in the GNSS community, a superscript $(k)$ is used to identify measurements from a specific satellite, with parenthesis to distinguish between superscripts and exponents.
Since we’ve calculated the satellite clock offsets, let’s go ahead and apply them to generate a corrected pseudorange. We’re also going to ignore ionospheric and trophospheric delays, thus lumping them into the error term $\epsilon_\rho^{(k)}$. The expression for the corrected pseudorange then becomes:
\[\rho^{(k)}_{corrected} = \rho^{(k)} + c \cdot \delta t^{(k)} = \sqrt{(x^{(k)} - x_r)^2 + (y^{(k)} - y_r)^2 + (z^{(k)} - z_r)^2} + c \cdot \delta t_r + \epsilon_\rho^{(k)}\]#initial guesses of receiver clock bias and position
b0 = 0
x0 = np.array([0, 0, 0])
xs = sv_position[['x_k', 'y_k', 'z_k']].to_numpy()
# Apply satellite clock bias to correct the measured pseudorange values
pr = one_epoch['PrM'] + LIGHTSPEED * sv_position['delT_sv']
pr = pr.to_numpy()
Least Squares Position Solution
The following is adapted from Blewitt (1997).
Let’s drop the subscript for the corrected pseudorange measurements and refer to them simply as $p^{(k)}$. With four or more linearly independent pseudorange measurements, we end up with the system of equations:
\[\begin{gather*} \rho^{(1)} = \sqrt{(x^{(1)} - x_r)^2 + (y^{(1)} - y_r)^2 + (z^{(1)} - z_r)^2} + c \cdot \delta t_r + \epsilon_\rho^{(1)} \\ \rho^{(2)} = \sqrt{(x^{(2)} - x_r)^2 + (y^{(2)} - y_r)^2 + (z^{(2)} - z_r)^2} + c \cdot \delta t_r + \epsilon_\rho^{(2)} \\ \rho^{(3)} = \sqrt{(x^{(3)} - x_r)^2 + (y^{(3)} - y_r)^2 + (z^{(3)} - z_r)^2} + c \cdot \delta t_r + \epsilon_\rho^{(3)} \\ \cdots \\ \rho^{(k)} = \sqrt{(x^{(k)} - x_r)^2 + (y^{(k)} - y_r)^2 + (z^{(k)} - z_r)^2} + c \cdot \delta t_r + \epsilon_\rho^{(k)} \end{gather*}\]where $x_r, y_r, z_r$, and $\delta t_r$ are the unkowns. We will substitute the receiver clock bias term with an equivalent value in meters:
\[b = c \cdot \delta t_r\]Since the system is nonlinear, we must approximate the solution using the Gauss-Newton algorithm for solving non-linear least squares problems. Let us define a function, $P$, for calculating an estimated or modeled pseudorange $\hat{\rho}^{(k)}$ based on estimates $\hat{x}, \hat{y}, \hat{z}, \hat{b}$ of the real position and clock offset values $x, y, z, b$:
\[\begin{equation} \hat{\rho}^{(k)} = P(\hat{x}, \hat{y}, \hat{z}, \hat{b}, k) = \sqrt{(x^{(k)}\ - \hat{x})^2 + (y^{(k)} - \hat{y})^2 + (z^{(k)} - \hat{z})} + \hat{b} \end{equation}\]We perform a first-order Taylor series expansion about our estimated values:
\[P(x, y, z, b, k) = P(\hat{x}, \hat{y}, \hat{z}, \hat{b}, k) + P'(\hat{x}, \hat{y}, \hat{z}, \hat{b}, k)(x - \hat{x}, y - \hat{y}, z - \hat{z}, b - \hat{b})\]where $P(x, y, z, b, k)$ is equal to our measured or observed psedurange $\rho^{(k)}$. The difference between the observed and computed pseudorange is therefore:
\[\Delta \rho = P(x, y, z, b, k) - P(\hat{x}, \hat{y}, \hat{z}, \hat{b}, k) = P'(\hat{x}, \hat{y}, \hat{z}, \hat{b}, k)(x - \hat{x}, y - \hat{y}, z - \hat{z}, b - \hat{b})\]Converting to matrix form and adding the error term $\epsilon$, we have:
\[\Delta \rho= \begin{pmatrix} \frac{\delta \rho}{\delta x} & \frac{\delta \rho}{\delta y} & \frac{\delta \rho}{\delta z} & \frac{\delta \rho}{\delta b} \end{pmatrix} \begin{pmatrix} \Delta x \\ \Delta y \\ \Delta z \\ \Delta b \end{pmatrix} + \epsilon\]Thus for $k$ satellites, we now have the system of $k$ linear equations:
\[\begin{pmatrix} \Delta \rho^{(1)} \\ \Delta \rho^{(2)} \\ \Delta \rho^{(3)} \\ \vdots \\ \Delta \rho^{(k)} \end{pmatrix} = \begin{pmatrix} \frac{\delta P^{(1)}}{\delta x} & \frac{\delta P^{(1)}}{\delta y} & \frac{\delta \rho^{(1)}}{\delta z} & \frac{\delta \rho^{(1)}}{\delta b} \\ \frac{\delta \rho^{(2)}}{\delta x} & \frac{\delta \rho^{(2)}}{\delta y} & \frac{\delta \rho^{(2)}}{\delta z} & \frac{\delta \rho^{(2)}}{\delta b} \\ \frac{\delta \rho^{(3)}}{\delta x} & \frac{\delta \rho^{(3)}}{\delta y} & \frac{\delta \rho^{(3)}}{\delta z} & \frac{\delta \rho^{(3)}}{\delta b} \\ \vdots & \vdots & \vdots & \vdots \\ \frac{\delta \rho^{(k)}}{\delta x} & \frac{\delta \rho^{(k)}}{\delta y} & \frac{\delta \rho^{(k)}}{\delta z} & \frac{\delta \rho^{(k)}}{\delta b} \end{pmatrix} \begin{pmatrix} \Delta x \\ \Delta y \\ \Delta z \\ \Delta b \end{pmatrix} + \begin{pmatrix} \epsilon^{(1)} \\ \epsilon^{(2)} \\ \epsilon^{(3)} \\ \vdots \\ \epsilon^{(k)} \\ \end{pmatrix}\]In matrix notation, this equation is commonly written
\[\mathbf{b} = \mathbf{Ax} + \mathbf{\epsilon}\]where vectors are denoted with boldface lower case characters and matrices with boldface upper case. GNSS resources typically refer to the matrix $\mathbf{A}$ as the geometry matrix $\mathbf{G}$. We will follow this convention here. We will call the pseudorange residual matrix $\Delta \mathbf{\rho}$. It also improves clarity to separate the receiver position from the clock offset, so we will continue to denote the clock offset $b$ while writing the position $\Delta x, \Delta y, \Delta z$ in vector form $\Delta \mathbf{x}$. Thus our system of linear equations becomes,
\[\Delta \mathbf{\rho} = \mathbf{G} \begin{pmatrix} \Delta \mathbf{x} \\ \Delta b \end{pmatrix} + \mathbf{\epsilon}\]It turns out the first three columns of $\mathbf{G}$ are just the unit vectors between the $k$th satellite and the estimated receiver position. This is because the unit vector effectively represents the proportion of the pseudorange which is tangent to each dimension. These unit vectors are found by normalizing the vectors $\mathbf{x}^{(k)} - \mathbf{\hat{x}}$ by their magnitudes $r^{(k)}$, where
\[\begin{equation} r^{(k)} = \lVert \mathbf{x}^{(k)} - \mathbf{\hat{x}} \rVert = \sqrt{(x^{(k)} - \hat{x})^2 + (y^{(k)} - \hat{y})^2 + (z^{(k)} - \hat{z})^2} \end{equation}\]All values in the fourth column equal 1, because the clock offset adds directly to the pseudorange with no geometric scaling factor required. Thus the geometry matrix G becomes:
\[\mathbf{G} = \begin{pmatrix} \frac{x^{(1)} - \hat{x}}{r^{(1)}} & \frac{y^{(1)} - \hat{y}}{r^{(1)}} & \frac{z^{(1)} - \hat{z}}{r^{(1)}} & 1 \\ \frac{x^{(2)} - \hat{x}}{r^{(2)}} & \frac{y^{(2)} - \hat{y}}{r^{(2)}} & \frac{z^{(2)} - \hat{z}}{r^{(2)}} & 1 \\ \frac{x^{(3)} - \hat{x}}{r^{(3)}} & \frac{y^{(3)} - \hat{y}}{r^{(3)}} & \frac{z^{(3)} - \hat{z}}{r^{(3)}} & 1 \\ \vdots & \vdots & \vdots & \vdots \\ \frac{x^{(k)} - \hat{x}}{r^{(k)}} & \frac{y^{(k)} - \hat{y}}{r^{(k)}} & \frac{z^{(k)} - \hat{z}}{r^{(k)}} & 1 \\ \end{pmatrix}\]For a full derivation of these partial derivatives, refer to Misra and Enge, Raquet (2013), or Ankur Mohan’s excellent blog post.
The matrix $\Delta \mathbf{\rho}$ is the difference between the measured and calculated pseudorange with the estimated parameters, calculated as follows:
\[\begin{equation} \Delta \mathbf{\rho} = \begin{pmatrix} \Delta P^{(1)} \\ \Delta P^{(2)} \\ \Delta P^{(3)} \\ \vdots \\ \Delta P^{(k)} \end{pmatrix} = \begin{pmatrix} \rho^{(1)} - \hat{\rho}^{(1)} \\ \rho^{(2)} - \hat{\rho}^{(2)} \\ \rho^{(3)} - \hat{\rho}^{(3)} \\ \vdots \\ \rho^{(k)} - \hat{\rho}^{(k)} \\ \end{pmatrix} = \begin{pmatrix} \rho^{(1)} - r^{(1)} - b \\ \rho^{(2)} - r^{(2)} - b \\ \rho^{(3)} - r^{(3)} - b \\ \vdots \\ \rho^{(k)} - r^{(k)} - b \\ \end{pmatrix} \end{equation}\]Solving the linear system to minimise the sum of the squared residuals $\epsilon^{(k)}$ results in the solution to the normal equations,
\[\begin{equation} \begin{pmatrix} \Delta x \\ \Delta y \\ \Delta z \\ \Delta b \end{pmatrix} = \begin{pmatrix} \Delta \mathbf{x} \\ \Delta b \end{pmatrix} = \begin{pmatrix} \mathbf{G}^T \mathbf{G} \end{pmatrix}^{-1} \mathbf{G}^T \Delta \mathbf{\rho} \end{equation}\]See p. 17 of Blewitt (1997) for a full derivation of this solution. After performing each linear least squares update, the estimated parameters $\mathbf{\hat{x}}, \mathbf{b}$ are updated:
\[\begin{equation} \begin{pmatrix} \hat{x}_{i + 1} \\ \hat{y}_{i + 1} \\ \hat{z}_{i + 1} \\ \hat{b}_{i + 1} \\ \end{pmatrix} = \begin{pmatrix} \hat{x}_{i} \\ \hat{y}_{i} \\ \hat{z}_{i} \\ \hat{b}_{i} \\ \end{pmatrix} + \begin{pmatrix} \Delta x \\ \Delta y \\ \Delta z \\ \Delta b \end{pmatrix} \end{equation}\]This process is performed iteratively until the magnitude of the change in position, $\lVert \Delta \mathbf{x} \rVert$, falls below a set threshold. In practice it usually only takes a few iterations for the solution to converge.
Below is the function to calculate rough receiver position. Its inputs are Numpy arrays containing satellite positions in the ECEF frame, pseudorange measurements in meters, and initial estimates of receiver position and clock bias. The unit for clock bias is meters, so you need to divide by the speed of light to convert to seconds.
This function is adapted and simplified from the MATLAB code in Ankur Mohan’s blog. It’s a simple least squares iteration with no correction for ionospheric delay or satellite movement during signal time of flight.
def least_squares(xs, measured_pseudorange, x0, b0):
dx = 100*np.ones(3)
b = b0
# set up the G matrix with the right dimensions. We will later replace the first 3 columns
# note that b here is the clock bias in meters equivalent, so the actual clock bias is b/LIGHTSPEED
G = np.ones((measured_pseudorange.size, 4))
iterations = 0
while np.linalg.norm(dx) > 1e-3:
# Eq. (2):
r = np.linalg.norm(xs - x0, axis=1)
# Eq. (1):
phat = r + b0
# Eq. (3):
deltaP = measured_pseudorange - phat
G[:, 0:3] = -(xs - x0) / r[:, None]
# Eq. (4):
sol = np.linalg.inv(np.transpose(G) @ G) @ np.transpose(G) @ deltaP
# Eq. (5):
dx = sol[0:3]
db = sol[3]
x0 = x0 + dx
b0 = b0 + db
norm_dp = np.linalg.norm(deltaP)
return x0, b0, norm_dp
x, b, dp = least_squares(xs, pr, x0, b0)
print(navpy.ecef2lla(x))
print(b/LIGHTSPEED)
print(dp)
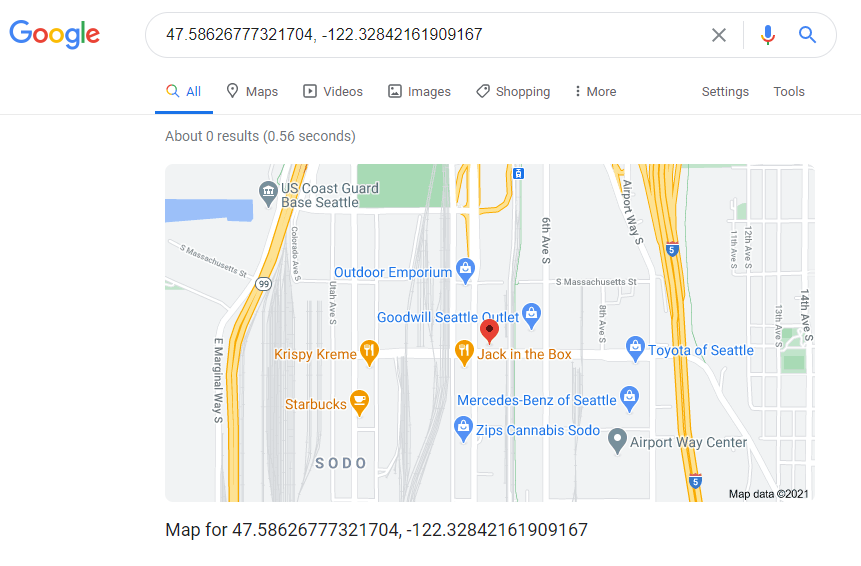
(47.58626777321704, -122.32842161909167, -4.783203065395355)
2.214374492481878e-07
29.948493973072832
Looks like it worked! The pseudorange residual is in the tens of meters, which is reasonable considering we didn’t correct for ionospheric delay or the rotation of the Earth during signal transmission. You can plug the latitude and longitude straight into Google and see that the resulting position is within a block or so of the intersection south of downtown Seattle where I started collecting data:
Now let’s wrap this entire process into a loop to calculate receiver position for every measurement epoch in the dataset with more than 4 satellite measurements.
ecef_list = []
for epoch in measurements['Epoch'].unique():
one_epoch = measurements.loc[(measurements['Epoch'] == epoch) & (measurements['prSeconds'] < 0.1)]
one_epoch = one_epoch.drop_duplicates(subset='SvName').set_index('SvName')
if len(one_epoch.index) > 4:
timestamp = one_epoch.iloc[0]['UnixTime'].to_pydatetime(warn=False)
sats = one_epoch.index.unique().tolist()
ephemeris = manager.get_ephemeris(timestamp, sats)
sv_position = calculate_satellite_position(ephemeris, one_epoch['tTxSeconds'])
xs = sv_position[['x_k', 'y_k', 'z_k']].to_numpy()
pr = one_epoch['PrM'] + LIGHTSPEED * sv_position['delT_sv']
pr = pr.to_numpy()
x, b, dp = least_squares(xs, pr, x, b)
ecef_list.append(x)
Results
Remember those coordinate systems I talked about earlier? Let’s do a couple transformations to convert the ECEF coordinates we just calculated into more useful LLA positions and NED translations from the starting position.
Finally, we’ll convert the list of NED translations and LLA positions into Pandas dataframes. We’ll save the LLA positions to a csv file and use the NED coordinates in Matplotlib to plot change in position relative to the first measurement epoch for each fix.
# Perform coordinate transformations using the Navpy library
ecef_array = np.stack(ecef_list, axis=0)
lla_array = np.stack(navpy.ecef2lla(ecef_array), axis=1)
# Extract the first position as a reference for the NED transformation
ref_lla = lla_array[0, :]
ned_array = navpy.ecef2ned(ecef_array, ref_lla[0], ref_lla[1], ref_lla[2])
# Convert back to Pandas and save to csv
lla_df = pd.DataFrame(lla_array, columns=['Latitude', 'Longitude', 'Altitude'])
ned_df = pd.DataFrame(ned_array, columns=['N', 'E', 'D'])
lla_df.to_csv('calculated_postion.csv')
android_fixes.to_csv('android_position.csv')
# Plot
plt.style.use('dark_background')
plt.plot(ned_df['E'], ned_df['N'])
plt.title('Position Offset from First Epoch')
plt.xlabel("East (m)")
plt.ylabel("North (m)")
plt.gca().set_aspect('equal', adjustable='box')

At this point our analysis starts to run into the limitations of Jupyter notebooks. The most universally compatible way to plot geodata in a notebook with an actual map background is to import an image of a map and set it as the background of a plot in Matplotlib, but that’s tedious and not as interactive as we’d like.
Fortunately VSCode has a fabulous plugin called Geo Data Viewer that drastically improves this experience. All you have to do is save the data you want to plot as a csv file and then open it with the extension. To get a better idea of how accurate our least squares position solution is, I’ve plotted the calculated positions as well as Android location fixes in the screenshots below. Location fixes from Android are in green and our calculated location solutions are shown in red. The first image looks pretty good:
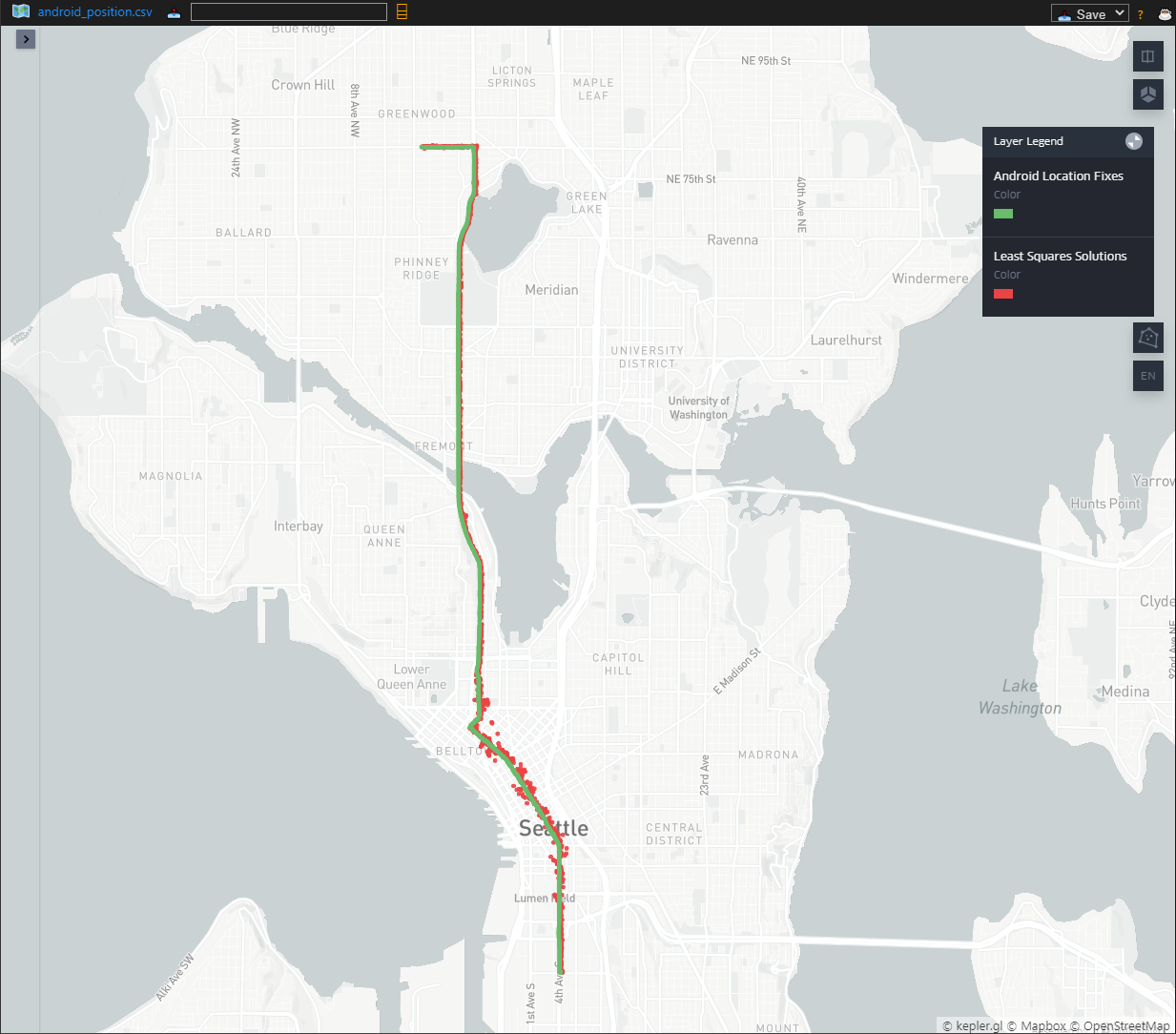
You can see some big variations in the downtown area, but otherwise our output up with the Android solution fairly well. Let’s zoom in and see what’s going on downtown.
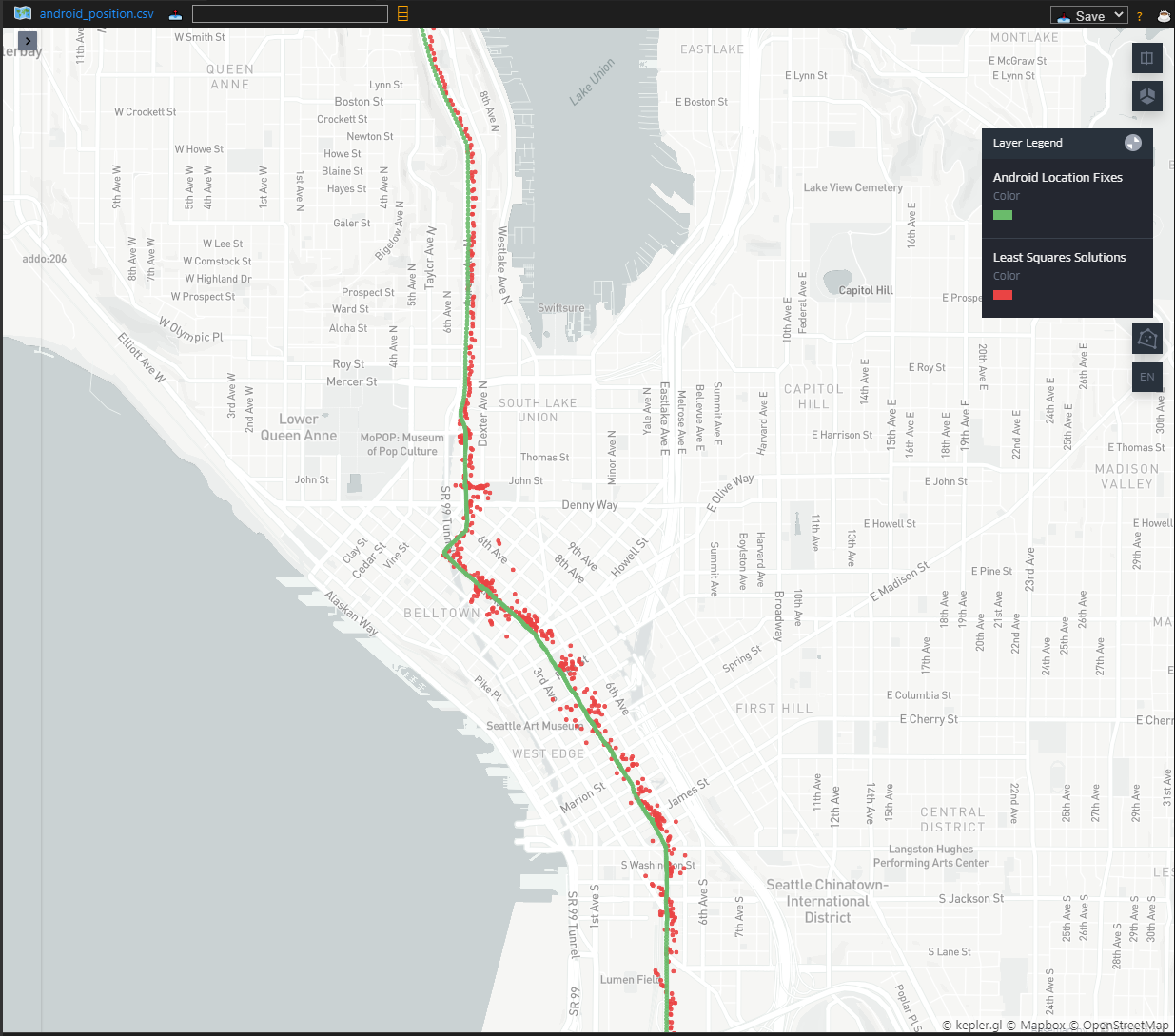
Hmm. Some of our solutions are off by multiple city blocks, which amounts to an error in the hundreds of meters. These large errors start to make sense when you consider the location. Downtown Seattle as many tall buildings which would substantially disrupt the GPS signal propagation, leading to the large errors we see here.
This isn’t a very comprehensive or scientific error analysis, but it is sufficient to tell us that our least squares solution is working. Since we didn’t correct for ionospheric delays or the rotation of the Earth during satellite signal transmission, errors in the tens of meters are very reasonable.
Conclusion
We have now successfully implemented an unweighted least squares solution for the GPS positioning problem.
There are a number of directions to go from here. The most obvious improvements begin with implementing standard corrections for ionospheric delay and satellite movement during signal time-of-flight. Next, the Android api field ReceivedSvTimeUncertaintyNanos can be used to generate weights and implement a weighted least squares position. Elevation angle and/or signal strengh can also be factored in to experiment with different weighting schemes.